
Ryan over at FortNine recently put up a video entitled ‘how pigeons explain a common motorcycle crash. The presentation says that pigeons “suck at assessing how fast a particular vehicle is closing on them”. And he points to some research that shows that in a particular speed zone, they take off at the same distance from a car no matter what the speed the car approaches at. He says that the pigeons learn the typical speed of cars in their zone. Ryan then says this is because pigeons lack ‘binocular disparity’ and the ability to judge approach speed.
What’s binocular disparity? Because we have two eyes which both offer a view of a particular object, each eye gets a slightly different flat 2-D image from the light that falls on to each retina.
Imagine a tree behind a car. The view of eye is at a slightly different angle, which means each eye will show the tree at a slightly different position relative to the car. The brain can uses these different images to extract depth information. This is binocular disparity.
Ryan then says that we can use binocular disparity “to judge how fast an object is closing on us”, and explains that this is known as ‘stereopsis’ and that “within thirty metres it’s the main method of gauging the speed of other vehicles”.
“Unless” he adds…
…”you’re a pigeon” because pigeons have their eyes on either side of their head.
And he then explains that as we’re sitting at a junction, we only have one eye turned towards the junction:
“Same handicap, see? Only one eye is looking because the other is blocked by my nose”.
He then says that this isn’t so much of a problem when tracking cars because “one eye can still track using the apparent change in size to gauge closing speed”. The problem with motorcycles is that because they are “skinny”, they “don’t show much enlargement” until the bike’s on top of the observer.

This is actually the phenomenon known as looming, and it’s well-known that it is easier to judge speed and distance for cars than bikes – for some reason, our brain measures the lateral growth of a car better than the vertical growth of a bike.
OK, so that’s the basis for the video. It’s plausible-sounding, particularly as it’s well-known that the brain ‘edits out’ the fact that our nose is actually visible in both eyes but I’d say there are significant flaws in the reasoning.
PIGEONS DO HAVE BINOCULAR VISION – Despite having eyes on either side of their head, and though they may turn their heads to scan you with one eye, even for pigeons the fields of view of their two eyes do overlap. Not by much, but pigeons WILL look straight at you and when they do that they are seeing you with both eyes. See the photo.
And although I have no proof, I’d suggest they DO need good depth perception – if they didn’t, they’d never manage to land on a narrow branch. They look directly ahead of them when landing.
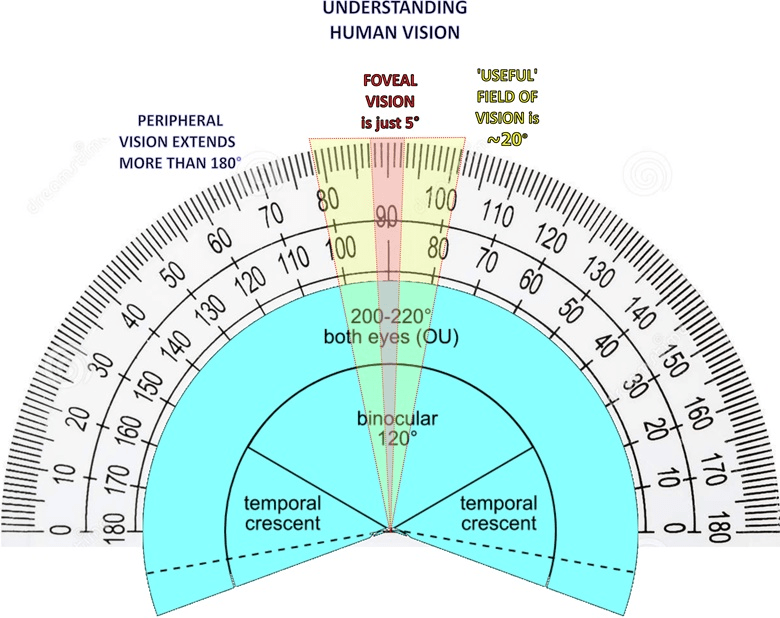
HUMANS HAVE A WIDE FIELD OF BINOCULAR VISION – For human vision, the overlap is around 120° – that means we have monocular vision ONLY for around 40° at each side of our field of view. Yes, the bridge of the nose occludes part of each eye’s visual field, but nothing like the extent of a pigeon.
PERIPHERAL VISION DETECTS MOVEMENT AND LIGHT – The pigeon’s eyes are on either side of its head because it’s a prey animal. The eyes give a ‘wrap-around’ field of view with only a very small blind spot directly behind its head. Humans do have a bigger blind spot, but even staring directly ahead, our eyes are sensitive to movement and lights at 90 degrees since that angle falls within our peripheral vision. And once something is detected, our instinct is to turn our head to look straight at it.
we turn our heads to focus both eyes…
‘USEFUL’ AND FOCUSED VISION IS MORE RESTRICTED – Within that binocular field, the so-called ‘useful’ field of vision – the visual area from which information can be extracted in a single glance without eye or head movements – is restricted to around 10° either side of our line of sight.
Even more crucially, if we want to extract detail information, then we have to aim our gaze and use ‘foveal’ vision. This is where we get the clear, colour and focused image of the world. The bad news is that it’s a tiny cone, just 5° across at the point our gaze is focused. This is down to the construction of the human eye.
TO SEE DETAIL WE TURN OUR HEADS – It’s simply not possible to gain full situational awareness by relying entirely on the peripheral vision. If we want to look at something in detail, we have to bring it into the centre of our visual field, into our gaze. Mostly, this is a function of the anatomy of the eye; the fovea, the central portion of the retina, has the highest density of photo receptors. It’s also connected to a much larger part of the visual cortex in the brain, where the visual data is processed.
Whilst peripheral vision can provide useful information to fill out situation awareness, for a detailed study of a particular object we need to turn our eyes onto it.
So when we want to see something in detail – including the involuntary response that happens when we detect movement or light in peripheral vision – we do the same ‘eyes front’ thing that the pigeon does when it needs to land. At junctions we don’t stare straight out of the windscreen, trying to work out what’s coming from each direction via peripheral vision from both eyes simultaneously; we turn our heads to search in each direction in turn, in order to point these foveal cones of vision towards the specific area we’re searching.
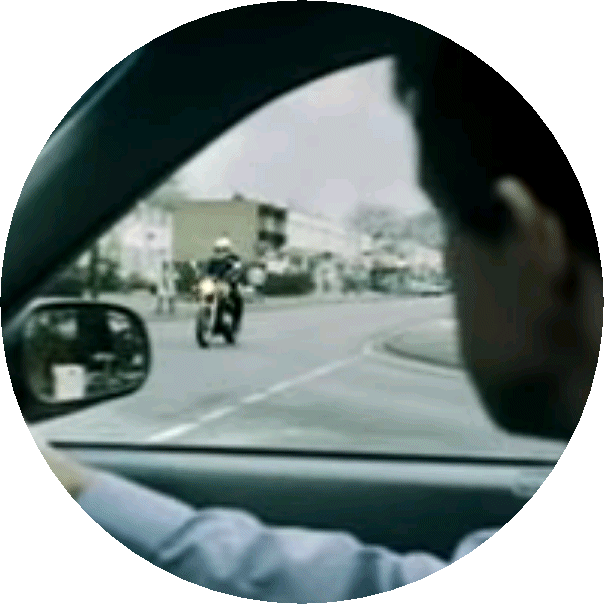
Image taken from ‘Look harder for bikes’ road safety video
Ryan talks about the issue of ‘tracking’ vehicles. The fact is we achieve this by looking directly at them. That implies we’ve already seen them and we’re not attempting to detect them. The difficulty of judging speed and distance occurs when we’re already looking at them.
DRIVERS TURNING INTO SIDE ROADS MISS BIKES TOO – If the pigeon vision issue really was a thing, how can we explain the fact that there are TWO collision types at junctions?
Whilst the collision with the driver who emerges from the turning on the nearside is the more common, a significant number of crashes involve an oncoming driver turning INTO the side road and across the driver’s path.
If the ‘looked but failed to see’ issue was really down to a chunk of the visual field being viewed only through one eye, these collisions shouldn’t happen – they’d be ideal circumstances for full binocular vision to detect the bike, then judge its speed to a nicety.
FAILED TO SEE ERRORS HAPPEN CLOSE UP – Ryan says that stereopsis is “the main method of gauging the speed of other vehicles… within thirty metres. I’ve no reason to argue with that, but let’s actually think about the collision dynamics.
30 mph is 13.4 metres per second. So thirty metres is something over two seconds away. Research into collisions suggests that the safe ‘cut-off’ when a rider is almost certain to avoid a collision is three seconds out from the crash – so something under fifty metres away at 30 mph. But at 60 mph, it’s getting on for one hundred metres away.
If Ryan’s figures are right, at rural road speeds the error happens well outside the limits of stereopsis. Even at urban speeds, the error in spotting the bike could happen right at the limits.
But even if the error did happen within the zone covered by stereopsis, there’s a second consideration. Even a rider who’s taken by SURPRISE! should be able to stop fairly comfortably within twenty five metres. I can – and have – stopped in about ten metres from 30 mph.
So if the bike actually HITS the car, the error MUST have happened closer. A LOT closer. If a driver somehow fails to detect a motorcycle less than twenty five metres away, I don’t think it’s a speed / distance misjudgement (with one exception – see below). It’s far more likely the driver simply didn’t SEE the bike.
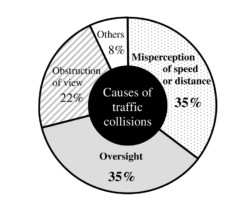
And that can happen because either the bike wasn’t VISIBLE when the driver looked (one in five of collisions) or the perception error was caused by one of the many PERCEPTUAL issues that fall under the ‘looked but failed to see’ umbrella (one in three collisions).
The bulk of ‘looked, saw but misjudged speed and distance’ errors (one in three collisions) seem to happen on faster roads where the bike is beyond the range of stereopsis, and we use the rate of change in size to judge approach speed – and now the difficulty in judging the lateral growth of a motorcycle most likely becomes crucial. The size of the machine only grows by a quarter, despite the distance halving.
(And dismiss the ‘driver didn’t look’ theory too – the proportion of collisions where the driver was distracted is tiny. If drivers genuinely ‘didn’t look’, they’d be bouncing off pedestrians, bikes, and buses – as well as other cars – every few seconds.)
OR THE RIDER WAS SPEEDING – Oddly enough, that researcher who found the pigeons scattered at the same distance from the car no matter what speed he approached at found something in common with drivers. We too gain a sense of how much time we have to turn at junctions based on the TYPICAL speed of vehicles.
So if ANY vehicle – not just a motorcycle – is travelling significantly quicker than average, that vehicle is far more likely to have a collision. It’s not the speed that caused it per se, although more speed means more difficulty stopping and a bigger impact if the rider hits something, other road users simply aren’t expecting the vehicle to be travelling at the excess speed, so don’t detect the anomaly easily and thus are more likely to turn across the rider’s path.
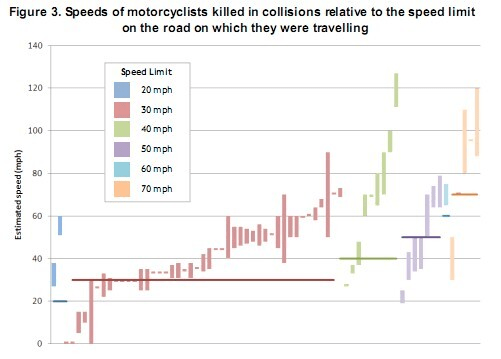
represents the speed of the rider estimated by police
I don’t think it’s any coincidence that in a study of fatal bike crashes in the London area a few years ago, the majority of the deaths in the lower speed limits involved riders who were exceeding the limit. The horizontal lines in the chart represent the speed limit. The vertical bars are the estimated speeds of the riders who died.
AND DRIVERS COLLIDE WITH CARS TOO – Research from the Netherlands a few years ago looked at car-motorcycle and car-car detection errors, and adjusted the rates for EXPOSURE – that it, how many bikes and how many cars a driver would encounter in the same time frame. And what they found was that far from picking out bikes to collide with, drivers actually made the ‘looked but failed to see’ error in front of another car just as often as they made the error in front of a two-wheeler.
We always have to be a little careful about taking data from one country and exporting it to ‘fit’ our own roads and in this case the Netherlands has many more mopeds on the roads than the UK so there’s the possibility that drivers were more ‘bike-aware’. But there’s other evidence that hints that in countries where most vehicles are two-wheelers, bikers crash into bikers at much the same rate as car drivers.
We also have to remember that our own PERSONAL stories are looking through the opposite end of the lens. We may think that drivers are more likely to make a mistake in front of us on our bike than other riders, but the fact is we’ll encounter many more cars than bikes on a ride.
AND A FINAL NAIL – I didn’t even mention the fact that a substantial minority of the population have various eye issues which makes stereopsis impossible, yet manage to drive successfully.
CONCLUSION – The FortNine videos that Ryan fronts are often informative as well as entertaining to watch. But in this particular instance, I think the reasoning he uses is flawed. And hopefully I’ve explained this clearly enough that you can follow my own arguments. I’d be interested in your comments too, of course.
BUT HERE’S WHERE I DO AGREE – If there’s one bit of the video that I absolutely concur with, it’s Ryan’s comment after showing the old mid-70s ‘Think ONCE, think TWICE, think BIKE’ TV advert. I wonder where he found that?
He says about ‘think bike’, “he’s not wrong, but it’s not useful either. If we’re dealing with a sensory problem then imploring drivers to see better is like imploring a deaf person to listen up. I’d rather take my own responsibility…”
Spot on. Be proactive. Don’t wait to be seen. Assume you won’t be detected and ride with that in mind.
You can watch the FortNine video here:
You can find out more about the Science Of Being Seen project here:
BOOK YOUR OWN PRESENTATION
I’m available to deliver the Science Of Being Seen (SOBS) presentation to clubs and groups around the UK IN PERSON, or anywhere in the WORLD via a WEBCAST, and at reasonable cost too.
SEND ME A MESSAGE AND I’LL GET BACK TO YOU.
