‘Science Of Being Seen’ (SOBS) – an in-depth investigation of the most common motorcycle crash of all – the ‘Sorry Mate I Didn’t See You’ or ‘SMIDSY’ collision.
WHAT IS SOBS?
Science Of Being Seen (SOBS) looks at a very simple motorcycle safety issue – just why it might be that motorcycles aren’t seen by other road users as they approach junctions and intersections. The aim is to offer motorcyclists and drivers (and road safety practitioners too) a better understanding of how, where and why these collisions happen, and to give riders some simple and practical strategies for staying out of trouble, and to offer drivers some help to avoid making the error in the first place.
Although I’d been investigating the likely causes of the SMIDSY collision for many years, as well as suggesting some avoidance techniques to riders, the ‘Science Of Being Seen’ presentation was originally created by myself (Kevin Williams MSc) over the winter of 2011-2012 as the third ‘accident prevention’ module of Kent Fire & Rescue’s pilot ‘Biker Down’ course. SOBS explores a range of problems:
:: ‘looked but COULD NOT see’ collisions, where for various reasons – including ‘beam blindness’ and the ‘constant bearing issue’ – it was physically impossible for the driver to see the motorcycle in the run up to the crash :: ‘looked but FAILED TO see’ collisions, where the bike was in a place it could be seen but visual perception issues meant that the driver failed to spot the bike :: ‘looked, SAW AND FORGOT’ collisions where short term visual memory and workload issues meant that the driver was likely to have seen the bike but mentally lost track of it :: ‘looked, SAW AND MISJUDGED speed and distance’ collisions, which tend to happen on faster roads
SOBS takes an objective look at the effectiveness or otherwise of the usual ‘passive safety’ conspicuity aids – hi-vis clothing and day-riding lights (DRLs) – before suggesting some general rules to make them more effective.
Finally, SOBS looks at how motorcyclists can use pro-active techniques to avoid being caught up in a SMIDY collision.
“A pioneering new course based on groundbreaking research seeks to end the ‘sorry mate I didn’t see you’ accidents.”
Or simply reinventing the wheel?
That was the headline in an article in Motorcycle News on April 1. I confess that I rarely part with cash these days for MCN so I didn’t actually see this until a firefighter who runs a fire services’s ‘Biker Down’ course sent me a PDF of the item.
It turns out that Smurfit Westrock have collaborated with Phoenix Motorcycle Training to offer free advanced training, and then “asked Phoenix if there was anything we could do to extend the training to include non riders.”
And apparently, the result was a collaboration “with Phoenix Motorcycle Training, Smurfit Westrock, Esitu Solutions and Nottingham Trent University” which explains why drivers don’t see motorcycles at junctions, and the result was simply astonishing:
“…we have evidence as to why this is. And it’s not simply a case of drivers failing to look, it is down to the fundamental biological and psychological make-up of human beings as well as their various experiences as road users.”
Wow. I wonder where I might have heard that before?
(HINT – click the picture below)
Anyway, MCN spoke to David Crundall, “a professor of psychology specialising in traffic and transport psychology at Nottingham Trent University” to understand more about the SMIDSY accident and what can be done to stop them being repeated.
I won’t repeat everything that David Crundle had to say, but I’ll summarise the main points.
Firstly, he said that “there are core psychological and physical reasons why drivers don’t see motorcyclists” and that “this isn’t always down to bad driving although this is undeniably sometimes the case” but “down to our physical and cognitive make up”.
And he stated that a chain of events can break down at any step:
1. the driver has to look – if he / she doesn’t look, the driver will not see the motorcycle
2. if the driver looks, the driver has to perceive the motorcycle – if the motorcycle is not perceived, the driver will not see the motorcycle
3. if the driver perceives the motorcycle, the driver has to assess speed and distance correctly – if the driver misjudges either, the result is likely to be an unsafe manoeuvre
I found this in a 2012 paper, and noted that there’s actually a fourth step needed – the motorcycle has to be where the driver can actually SEE it. So the corrected chain of events is:
does the driver look? > can the driver see? > does the driver perceive? > does the driver judge correctly?
And he went on to explain why we look but sometimes do not see a motorcycle. He talked about how we “build up a mental model and set of rules on how to react and interact” as we gain experience, called schemata. And he pointed out that with motorcycles being just 1% of traffic, “drivers don’t gain much experience on how to deal with them and the habits on how to interact with the other 99% of the traffic take over” and their schemata which rarely have to deal with motorcycles become “more and more entrenched which is why it is often harder for more experienced drivers to see motorcyclists”.
This is what I described as the ‘prevalence effect’. You’ll find this discussed here:
Professor Crundall talks about how “our brains are hard wired to quickly spot big objects which might cause us harm but smaller objects take longer for the brain to see, as from an evolutionary perspective now less likely to harm us”. He termed this Global Precedence Theory.
That’s not my understanding (and I actually need to update Science Of Being Seen with my revised information), which is this: Global Precedence Theory, introduced by David Navon in 1977, suggests that in visual perception, humans tend to process the overall structure (the ‘global’ features) of an object or scene faster than its individual components. It’s sometimes referred to as the “forest before trees” effect, where processing the ‘overall shape’ of the scene interferes with the perception of the smaller components; in this case motorcycles. Nothing to do with harm.
But combine what with the schemata in which drivers expect to see cars, and it’s easy to see how a driver can fail to detect “the small unexpected object which is a motorcycle. The brain simply doesn’t see the motorcycle and assumes all is well”.
Professor Crundall then introduces blind spots and says “to compensate the brain makes up the rest of the image to fill in this gap which is why you don’t have a black hole in your vision”.
I’ve never understood this particular theory, simply because of the location of each eye’s blind spot. The eye’s blind spot (known as the optic disc) is located approximately 12° to 15° out of the line of direct sight toward the temple and about 1.5° below the horizontal. This means the blind spot clearly sits outside our cone of clear, colour vision which is received by the part of the eye called the fovea. When we look straight ahead at a fixed point, keeping it in foveal vision, the blind spot for your right eye is to the right of that point, and the blind spot for your left eye is to the left, and slightly below for both eyes. And with both eyes open, the blind spot of one eye is covered by the visual field of the other. What he doesn’t mention are the physical blind spots created by the vehicle’s structure covered here: https://scienceofbeingseen.org/2-smidsy-looked-but-could-not-see/ ), which are hugely more significant than the eye’s blind spots. There’s more about the limitations of the human eye here:
The next point made by Professor Crundall is that “our peripheral vision is nowhere near as good as we think it is . While the world looks very clear at the point we are looking at, the peripheral world is blurry and less colourful. Unfortunately if there was something small and important in these visual areas such as a motorcycle it can get overlooked” .
As I point out, since our clear, colour and focused vision only occurs across a tiny zone, the vast majority of incoming visual data falls into the fuzzy, colourless peripheral vision but our brains create an the illusion of full-colour vision over a wide area. You can read that here:
Then he moves to “the looming effect which is an optical phenomenon which can confuse the brain. Imagine you are waiting to pull out of a t-junction you look to the right and see a car coming towards you as the car gets close the size of its image on the retina expands. We use this information to judge the car’s approach speed. However the narrow profile of a motorcycle means that its retinal expansion expansion rate is much lower and can easily fall below the threshold to detect looming. An oncoming motorcycle might not appear to be getting closer and then all of a sudden it is on top of us”.
This connects with the ‘size-arrival’ effect which is a separate but linked phenomenon that explains why drivers often misjudge the approach of smaller vehicles like motorcycles. While looming is the primary visual cue used to perceive an approaching object, the size-arrival effect acts as a perceptual bias that distorts how we interpret that cue based on the object’s physical size. That’s all here:
He also says that “at this point psychological bias can also come into play as motorcycles are small and therefore not an evolutional threat” and that “a driver’s decision to pull out possibly taking a chance can be influenced by this perceived lack of risk”.
I have to be honest. This seems unlikely. I haven’t found any research that backs me up but my personal observation is that most people will back away from a wasp (very small) but I believe hippos kill more humans than any other animal. They are pretty big but people seem keen to approach them. I think this ‘harm’ believe goes back to an observation made by Harry Hurt in the 70s. More research required.
He then talks about ‘in groups’ and ‘out groups’, and says that we are psychologically drawn to people who we perceive to be like ourselves, and that “the out group contains people who you do not identify with and whom you do not understand”. I’ve referred to this as the ‘Classic Car Effect’, where if you start to drive something a bit unusual, suddenly other identical vehicles will jump out of the scenery. It’s called ‘semantic meaning’. That’s discussed here:
And he concludes: “wearing high visibility clothing helps, but a lot of the reasons car drivers don’t see motorcyclists are psychological and physical. If you understand the issues to do with looming effect, blind spots, global precedence theory and how drivers minds work you start to tailor your riding to take this into account. Errors still happen so you will need to be aware and make judgments to reduce the risks by giving yourself space and time to react but this knowledge into how a drivers brain and body work will help. The bottom line is that if you see a driver at a junction and they look towards you, don’t just assume you’ve been seen. They might have looked but not have actually seen you”.
All this is pretty much covered by my conclusions:
Now I appreciate that Professor Crundall has done primary research in the topic, and I haven’t. But he’s far from the only one. What I have performed is ‘secondary research’, collating the work that other people have done in a unique way/There is a body of research on the SMIDSY that goes back to the 1960s and I spent a lot of time and effort back in 2011 and 2012 (as well as in subsequent years updating everything) researching what became the Science Of Being Seen presentation, and a couple of years later the website, and the short explainer book of the same name. The PDF of that book can be found here by the way:
Anyway, to carry on with the other element of the story. What could be done to fix the problem?
Well it turns out Phoenix boss Mark Jaffe has the solution. It’s a course for drivers to help them understand why looked but failed to see collisions occur and they want to roll it out throughout their network of 26 right the training schools .
Apparently according to Mark it would be very easy to roll out as it “just involves a training room”.
Blimey. Guess what I’ve been delivering personally to car groups since before lockdown?
It’s the Presentation called ‘Science Of Being Seen for Drivers’, where I suggest proactive scanning strategies to overcome these visual flaws, including:
1. Slow Down the Scan: Moving the head more slowly across the scene reduces the duration of saccadic gaps and allows for more frequent fixations.
2. The “Double Check” Pause: Incorporating a deliberate pause when looking in each direction allows the brain to “uncloak” objects that might have been missed during a quick sweep.
3. Head Bobbing: For drivers, moving the head slightly (“bobbing”) helps peek around “Vision Blockers” like the vehicle’s A-pillars that might be hiding a motorcycle..
Just add some collision scene management training, and some practical first aid to treat the injured motorcyclist at the scene of a crash and you’ve pretty much (re)invented…
…Biker Down!
It was never intended simply for bikers.
So claiming “groundbreaking research” is a clear failure to acknowledge the efforts of the original Biker Down team put together in Kent by firefighter James Sanderson, and a failure to reference SOBS which was (as far as I am aware) the first attempt to pull all the science on the SMIDSY into one place.
Whether the Professor is aware of the Biker Down/SOBS history, I cannot say. However, the work has been widely publicised within the industry. Starting as a module for ‘Biker Down’ when it went national, I have presented it to an online RoadSafetyGB webinar, it’s featured in Devitt Insurance’s biking articles, I’ve delivered the presentation to groups and clubs in-person and online, and I’ve written numerous articles for my own Facebook and social media accounts. I’ve delivered it to the UK police in London and Kent, and I’ve even taken it out to New Zealand for bikers down under. Mark Jaffe is also a regular on LinkedIn, where I have frequently shared SOBS updates.
[EDIT: And I just remembered — the Kent Biker Down team actually took the course to MCN’s headquarters in Peterborough and delivered it to a mix of journos and staff! I was there too and personally delivered Science Of Being Seen to them.]
And I wrote a short explainer book of the same name, which you can purchase as a paperback or an instant download PDF.
Ultimately, while I am happy to see this knowledge reaching a wider audience, it is important for the integrity of road safety research that the foundational work — developed back in 2012 and offered freely via scienceofbeingseen.org since 2018 — is correctly attributed. After all, I’ve spent my own time (and money) making it available to anyone free, gratis and for nothing.
Oh, and final point. Actually you don’t even need a classroom to deliver these educational . You could run it as a webinar and make it accessible to pretty much anyone.
Since you’re here, I’ve a small favour to ask. Science Of Being Seen remains completely unsupported by the Road Safety Industry, and supported entirely by donations.
If you feel able to make a small donation to the upkeep and continued development of SOBS, why not buy me a coffee? Each contribution is much appreciated and gets you access to my archive of more than ten years of better biking posts.
Just a very quick one today, but spring’s here and that means the buds on the hedgerows are starting to burst with the vivid green leaves again. And that Saturn yellow vest you’ve been wearing all winter? It’s now acting more like camouflage than a conspicuity aid.
———————– Find out more about the Science Of Being Seen #SOBS on the FREE www.scienceofbeingseen.org website An in-depth look at the facts behind conspicuity! ———————–
Check out the photo, clipped from a BikeSafe page. Spot the bikes. Does one rider and machine stand out rather better than the other two? Is one bike harder to spot than the other two? It’s thanks to the grass bank, and the effect of contrast. And just wait till the hedgerow in the background comes into leaf!
My personal recommendation for rural riding at this time of the year is always pink but I can understand if you don’t fancy that colour. Try orange instead!
——————————— IF YOU THINK THIS POST HIT THE SPOT please pay it forward to other bikers! Like ✔ Comment ✔ Share ✔ Follow ✔
ANSWERING QUESTIONS NO-ONE ELSE ASKS FIND OUT how you can get Survival Skills! visit us at www.survivalskills.co.uk
There’s a rather well-written post on LinkedIn called ‘Looked but failed to see – the hidden danger lurking in plain sight’ by Steven Gibb, a ‘driver training specialist’.
“Have you ever heard a driver say, “I looked, but I never saw them”? This common phrase is at the heart of one of the most dangerous cognitive failures on the road: Cognitive Perception Failure (CPF).”
He continues: “CPF is responsible for a significant number of collisions involving motorcycles, pedestrians, cyclists, and even emergency vehicles. Drivers often check their surroundings yet fail to perceive critical hazards—resulting in potentially fatal consequences.”
Steven says that there is “science behind cognitive perception failure” and that “CPF is not about poor eyesight—it’s about how the brain processes visual information. Research highlights several key reasons why drivers miss hazards, even when looking directly at them”.
Steven correctly says that amongst the real-world consequences are motorcycle and bicycle accidents including “the infamous “Sorry Mate, I Didn’t See You” (SMIDSY)” which results when drivers “fail to register their presence”.
And he goes on to talk about:
inattentional blindness
saccadic masking
expectation bias
cognitive load and distractions
If you’re a regular here, you’ll almost certainly have realised that everything in Stephen’s LI post are topics covered in ‘Science Of Being Seen’, the presentation I created as long ago as early 2012 when SOBS debuted as the third module for the pilot Biker Down courses.
SOBS also talks about some other very important perceptual issues, including motion camouflage and our remarkable inability to firstly see what we’re not expecting and secondly guess what we might not be seeing (both exploited by magicians).
SOBS also talks about the ‘looked but COULD NOT see’ and ‘looked, saw and MISCALCULATED speed and distance’ issues that cause a significant chunk of the collisions at junction.
And of course, SOBS also debunked the simplistic “put your lights on and wear hi-vis and you’ll be seen” road safety advice by examining the effect of contrast camouflage, then pointed out the absolute requirement for riders to understand the importance of pro-active evasion and avoidance techniques to escape the moment we’re NOT seen.
================================= WHAT IS SCIENCE OF BEING SEEN? (SOBS) SOBS is my in-depth investigation into the ‘Sorry Mate, I Didn’t See You (SMIDSY) collision between motorcycles and other vehicles. Created for the fire services ‘Biker Down’ course, it’s based on science, not speculation. I aim to quash some persistent myths about how and why junction collisions happen, and show how motorcyclists can employ simple techniques to stay out of trouble!
Personally, I’d been talking about many of the issues since at least the mid-90s on my website blogs, as well as on bike forums and from the first SOBS presentation in early 2012 and right up to 2025, the SOBS presentation has been put together as a research-based explanation for the SMIDSY collision, and one which doesn’t rely on the time-worn trope that collisions at junctions happen “because drivers don’t look properly for motorcycles”.
What made SOBS unique at the time was not just that it was the very first time anyone had made a serious attempt to explain to motorcyclists (and anyone else who would care to listen) just how easy it was for drivers to ‘look but fail to see’ a motorcycle at a junction and why we need to look after ourselves, but – second unique point – everything was being covered TOGETHER to create a straightforward and cohesive explanation for the SMIDSY.
Having said all that, and whilst it would be nice to get a credit, the fact is I’m happy to see more articles covering the visual perception issues like this starting to appear for a very simple reason; the more articles like this that cover the science in a readable way, the more chance there is that ordinary riders will read them then actually start to believe there’s more to not being seen than drivers ‘not looking properly’.
And if we can convince enough riders to believe that, those individuals might start making pro-active efforts to protect themselves, and then we might actually begin to see a reduction in the proportion of ‘looked but failed to see’ collisions happening at junctions.
We still have a long way to go though. One of the very first comments on the LinkedIn article was to dismiss it:
“Drivers don’t look properly for motorcycles.”
I’m still fighting that response myself. Sometimes you really can lead the horse to water but it’s still hard to convince it that it needs to take a drink.
——————————— IF YOU THINK THIS POST HIT THE SPOT please pay it forward to other bikers! Like ✔ Comment ✔ Share ✔ Follow ✔
ANSWERING QUESTIONS NO-ONE ELSE ASKS FIND OUT how you can get Survival Skills! 👉 visit us at www.survivalskills.co.uk
On 23 January 2018 a helicopter and a fixed wing plane crashed after a mid-air collision near Philippsburg, Baden-Wurttemberg, in south west Germany. Four people, two from each aircraft, died. Both crews were conducting training flights under what the aviation world terms ‘Visual Flight Rules’ where the principle of “see and avoid” applies. The tragedy happened despite what was described as a dramatic last moment evasive movement by the fixed wing plane.
It should, since the roads also operate under our own version of Visual Flight Rules and the principle of ‘see and avoid’ also applies to us.
The key point of Visual Flight Rules is that BOTH crews should be looking out for each other.
Yet what do we do on the roads?
The driver who doesn’t have priority has to look out for, then avoid the driver who does. Rather than set up the rules so that BOTH road users have equal responsibility to avoid a potential collision, the notions of ‘priority’ and ‘culpability’ creates a situation in which one of the collision partners firmly believes that it wasn’t THEIR job to look out for a potential crash.
“The driver didn’t look properly.”
“The driver should have looked harder.”
I’ve lost count I’ve heard riders saying just those things after a near-miss or an actual collision.
So does this reliance on ‘the other fellow’ work? Does it, heck!
You, me and everyone else on the roads is human. Humans frequently make mistakes, often misjudge the threat level, and occasionally take extreme risks.
So WHY would we believe those statements of error?
Because we are routinely told this is the problem. Just do a google on ’cause of collisions driver failed to look’ and you’ll see what I mean. I’ll just give you a single example and leave you to find your own.
“‘Failed to look’ is number one contributory factor”
That’s the Road SafetyGB website, dated July 6 2015. The text continues:
“The IAM says a Freedom of Information request to the DfT confirmed ‘failure to look properly’ as the most common contributory factor which is included in more than 30,000 collisions annually.”
Sarah Sillars, then the IAM’s chief executive officer, said:
“These figures show conclusively that simple human errors continue to cause the majority of accidents. Drivers cannot blame something or someone else for a collision happening… the message is clear that drivers must apply their full attention to driving…”
‘Drivers cannot blame something or someone else’… but isn’t that EXACTLY what we do when we claim a driver didn’t look properly? “It’s not my fault, mate, I wasn’t supposed to be looking.”
================================= WHAT IS SCIENCE OF BEING SEEN? (SOBS)
SOBS is my in-depth investigation into the ‘Sorry Mate, I Didn’t See You (SMIDSY) collision between motorcycles and other vehicles. Created in 2012 for Kent Fire & Rescue as the third module of the pilot Biker Down courses, our team was awarded a Prince Michael of Kent International Road Safety Award later that year. SOBS has gone international and features in New Zealand, the US and at home with RoadSafetyGB in 2021.
NOW WATCH SCIENCE OF BEING SEEN ONLINE
WATCH OUT FOR SOCIAL MEDIA ANNOUCEMENTS =================================
Each year, there are calls for more training, more penalties, yet if the IAM repeated the exercise today, nine years later, they’d discover the ubiquitous ‘failure to look properly’ is still top of the list. Yet, the fact is that when a ‘looked but failed to see’ collision happens, it’s often the case that the vehicle that caused the collision was VISIBLE to the other driver in the run-up to the crash. Two to Tangle.
But most riders and drivers believe that the OTHER driver should be keeping them safe. Just think about all the “be safe, be seen” campaigns there have been over the years.
The trouble is, taking that to be our ‘system of road rules’ effectively means that half the road users at any one moment are ‘flying blind’ and NOT looking out to see why they may need to avoid another vehicle.
Ask yourselves, how many of us put any REAL effort in to ‘flying’ our bike to the equivalent of aviation’s Visual Flight Rules? How many of us are actually ready to ‘see and avoid’?
When will road safety stop telling us that collisions are the ‘fault’ of the person who made the initial error? Isn’t it time that we changed our thinking and took some responsibility for staying out of crashes like this? When will we all be encouraged to take some personal responsibility for searching out the drivers about to make an error?
Junction collisions are ‘Two to Tangle’ incidents – one road user’s error sets up the collision, but there are no rules that say we have to ride into it. Let’s apply our own ‘Visual Riding Rules’ by looking out for ANYONE who could pose a threat…
…and stop putting ourselves in the line of fire simply because the Highway Code says it’s someone else to keep us out of trouble?
——————————— IF YOU THINK THIS POST HIT THE SPOT Like Comment Share Follow
ANSWERING THE QUESTIONS NO-ONE ELSE ASKS FIND OUT how you can get Survival Skills! visit the website at www.survivalskills.co.uk ———————————
It’s almost thirty years since I trained up as a CBT instructor. As part of the second ‘classroom’ session – officially known as ‘Element D: on-road preparation’ – we had to attempt to prepare our novice riders to cope with the on-road element…
…all in about 30 to 40 minutes.
One issue we had to cover was to explain that motorcyclists run a significant risk of not being seen by other road users. The ‘looked but failed to see’ error is so common it has its own abbreviation in research literature (LBFTS). I’m sure it’s old hat to regular readers of my pages, but for a new riders it can be hard to comprehend.
The original ‘Think Bike’ film
So what was the DVSA’s guidance to us instructors? ? Essentially, we were supposed to tell trainees that they were to make themselves easier to be seen; we had to explain the use of conspicuity aids, the differences between daytime fluorescent clothing and night-time reflective kit, and why they should use dipped (low beam) headlights in day time (day-riding lights).
It all began with the first ‘Ride Bright’ campaigns in London in the mid-70s. Many riders voluntarily adopted hi-vis clothing – I was one. Most turned their lights on too – me included when I graduated to a bike with a decent alternator. In fact, motorcycles have had their headlights wired permanently on for over fifteen years.
Just one problem. There is no evidence of positive results.
Drivers turning at junctions still look, then fail to spot an approaching motorcycle. And the ‘Sorry Mate I Didn’t See You’ collision with another vehicle at an intersection remains the most common crash involving a motorcyclist. The photo is clipped from the mid-70s ‘Think Once, Think Twice, Think BIKE!’ public information film, incidentally.
Why?
Here’s my guess. There’s an unintentional subtext to all the ‘Think Bike’ campaigns that we have been having since the mid 1970s. In telling new riders to “make yourself easier to see”, the subtext is this – when we encounter another vehicle at a junction ‘the other fellow’ is RESPONSIBLE for LOOKING FOR US.
And if they don’t see us and a collision occurs?
Then they ARE NOT DOING THEIR job – they must be incompetent or inattentive.
Worse, thanks to the ‘make yourself conspicuous’ messaging, riders come to believe that if they use conspicuity aids, they WILL be seen. Believing that, they don’t pay attention to the potential crash that’s being set up for them. Then when a driver commits the ‘looked but failed to see’ error and turns into the path of the approaching motorcycle, the rider sees what’s happening too late and is caught by SURPRISE! And thus riders fail to get out of collisions that could have been avoidable if only the rider had sounded the horn, then braked or swerved, promptly.
“The driver should have seen me” is all too common as a post-crash refrain.
As I’ve been saying for more than two decades – based on my own decade and a half of dodging vans and taxis in London – telling the driver to look out for bikers is only one-half of the story; far more often than not, the rider sees the turning vehicle – or at least the point at which it will appear – well BEFORE the collision becomes inevitable.
It’s this awareness of the need to search out the potential for a SMIDSY collision before it happens, and to understand what to do to stay out of trouble is what underpins the ‘No Surprise? No Accident!’ concept.
That’s why back in 2012 I delivered the very first Science Of Being Seen (SOBS) presentation at the pilot Biker Down course in Kent. Rather than say “wear hi-vis and ride with your lights on so drivers see you”, SOBS took a rather different look at conspicuity aids – explaining why sometimes they DON’T work:
:: looked but COULD NOT see – the bike wasn’t where the driver was able to see it (accounts for around 1 in 5 collisions) :: looked but FAILED TO see – the bike was visible but due to issues such as motion camouflage, saccadic masking and ineffective conspicuity strategies, the driver failed to detect it (the cause of around 1 in 3 collisions) :: looked, SAW AND MISJUDGED – the bike was visible but drivers find it hard to accurately calculate ‘time to collision’ particularly on quicker roads (setting up another 1 in 3 collisions)
When we know WHY the collisions happen (and incidentally, distracted driving accounts for less than one in ten of the total, using a mobile at the wheel is about as likely to cause a SMIDSY as a medical emergency at the wheel), we can suggest some defensive measures.
The first is simple enough – ride where we can be seen, and be alert to moments we CANNOT be seen. We need to be aware of the effect of ‘Vision Blockers’ between our position and someone looking for us and to understand the driver blind spot issues caused by the vehicle structure itself. If we can’t be seen, no conspicuity aid will work.
Then and only then should we consider improved conspicuity strategies – I have suggested swapping Saturn yellow (the most common shade of hi-vis but a colour that’s a poor contrast with foliage in rural areas) with Pink for rural daytime use.
And finally I promote the use of proactive responses to a POTENTIAL threat from a vehicle that COULD be about to turn across the rider’s path including sounding the horn, slowing down, changing position and setting up the brakes. It’s not difficult – after all, there are only two things that a vehicle intending to turn into our path can do – wait till we’ve passed by. Or pull out.
So has this ‘protect yourself’ approach filtered down to other road safety campaigns?
Well, there are finally signs that just possibly it has. Back at the beginning of the month, Warwickshire Police announced their usual enforcement campaign, but also mention a new ‘Ride Craft Hub’ which:
“…will help riders identify a SMIDSY situation and protect themselves”.
And last week whilst searching for something else, I found that a couple of years back I’d reported on a story from Tasmania that shows another small but significant indication that the official attitude to rider training is slowly beginning to change.
Stating that the rate of motorcycle accidents in Tasmania had become too high, Infrastructure minister Rene Hidding said that initially the state rolled out more mandatory training “just as had been done in so many other places”.
But Ms Hidding continued:
”It became obvious that people in the industry knew [the process] was wrong.”
A Victoria-based trainer, Duncan McRae, was called in to create a new curriculum which he said was “built around educating riders about those five common crash types that we see most often”.
Does that sound like something you might have heard here?
So, small beginnings, but I believe we’re seeing indications of a shift towards the ‘No Surprise’ approach to riding.
I’m not saying we should stop telling drivers to ‘Think Bike’ as some seem to have assumed, but we should certainly start encouraging a ‘Biker THINK!’ mindset.
I do apologise if I seem to be banging the same drum, but until riders really do accept that SMIDSYs aren’t an automatic consequence of riding a bike, someone has to. And I’ll see what I can dig up on the background to the Tasmanian curriculum change. Watch out for that soon.
*** SCIENCE OF BEING SEEN *** Moving from ‘Think Bike’ to ‘Biker THINK!’ Ten days ago on my Facebook page http://www.facebook.com/survivalskills, I posted an article about the lack of imagination in Police Scotland’s response to motorcycle crashes – basically, it was more enforcement. At the same time, what caught my eye was the goal that the Scottish ‘Road Safety Framework’ is aiming for is a 30% reduction in motorcyclist KSIs by 2030.
Suggesting that some new ideas were needed, I promptly got a response from an accident claims firm in Scotland telling me about their campaign aimed at drivers called ‘Take Another Look’:
“We are calling for a new campaign to ‘#takeanotherlook’ at junctions…”
On the face of it, that seems like a good idea. Nationwide data from the Department for Transport shows that in 2021, intersections – whether they are T, Y or staggered junctions – are the most common locations of motorcyclist casualties. Collisions at junctions represent no less than 34.7% of combined fatalities and injuries – one-in-three.
The ‘Take Another Look’ people offer an answer as they say their ‘new’ campaign is “…echoing the ‘Think Bike’ initiative of the 1970s that was aimed at increasing motorists’ awareness of motorcycles and reducing accidents caused by failure to spot them in time.”
Just one problem. Whilst calling for a 30% drop in motorcycle casualties by 2030, that same Scottish Road Safety Framework document made this telling statement:
“With regards to longer-term trend of motorcycle fatalities since 1994, there have been many peaks and troughs, and we are still in the same position we were in thirty years ago.”
On the one hand, we have a freshly-minted safety campaign simply repeating what we have been trying for the last fifty.
On the other, we have a statement of fact telling us that thirty years of Scottish motorcycle safety campaigns haven’t changed anything in thirty years.
Shouldn’t that be telling us something? Why are we expecting something that hasn’t worked for half a century to suddenly start working now?
Even if the people putting these campaigns together can’t see it, can’t we motorcyclists see that it’s time to move on from expecting drivers to keep us safe by ‘Thinking Bike’? Isn’t it time to adopt a fresh approach where we learn more about just why drivers don’t see motorcycles, to adopt a proactive approach where we stop relying on others, and crucially to learn to look for ways to avoid being caught up in what needn’t actually be a collision?
Biker, THINK!
================================= WHAT IS SCIENCE OF BEING SEEN? (SOBS) SOBS is my in-depth investigation into the ‘Sorry Mate, I Didn’t See You (SMIDSY) collision between motorcycles and other vehicles. Created for the fire services ‘Biker Down’ course, it’s based on science, not speculation. I aim to quash some persistent myths about how and why junction collisions happen, and show how motorcyclists can employ simple techniques to stay out of trouble! FIND OUT MORE – http://www.scienceofbeingseen.org BUY THE SOBS e-book – https://ko-fi.com/s/88fbc15a82 WATCH OUT FOR LIVE ONLINE TALKS
I was recently sent a screenshot from a video which included the expression “science of why we’re not seen on the road as motorcyclists”. It was shown on YouTube and featured an interview with Steve Reed of Biker Down North America at the Toronto Motorcycle Show earlier this month.
You’re probably aware if you’re a regular on my pages that I created a presentation called ‘Science Of Being Seen’ (SOBS) as a module of the award-winning ‘Biker Down’ course originally pioneered by Kent Fire and Rescue Service (KFRS).
As Biker Down was picked up nationwide, I made the background information my presentation was based on freely available to all fire services to use, requiring only a simple attribution to myself as the creator of the work. And I personally delivered the SOBS presentation until lockdown in 2020. Then in 2021, I was told that that SOBS was no longer going to be used and that it would be replaced by a brand-new ‘Thinking Biker’ video to be created in Canada. At the same time my personal connection with KFRS was to severed.
Since I was never officially connected with KFRS, the fact is I retain copyright on the Science Of Being Seen presentation and I continue to research the topic and deliver talks online and in person to motorcycle groups today.
So, as you might expect, I watched the video with interest to see the context in which that form of words was used.
Steve starts off by explaining how Biker Down came about:
“Biker Down was started over 10 years ago in the UK by UK Fire and Rescue and the premise was pretty simple… often times motorcyclists are riding together in groups or we’re riding the same great roads and so it’s sort of a natural thing that often times the first person upon a scene of a motorcycle accident could be a fellow rider. And so the the founder of Biker Down UK Jim Sanderson sort of had an epiphany moment when he was riding with a group and he came to decide that hey what we do actually isn’t that difficult we could teach it to the average rider and so that was sort of the genesis for Biker Down.”
Well, not quite.
This is going to be a very long post which I doubt that many people will be that interested in but I think it’s important to document exactly how the Biker Down course came into being, just what my connection with the course actually was, my involvement with Steve Reed and Thinking Biker, as well as how my time with Biker Down came to an abrupt end.
It true that it all started in 2011. It’s true that Jim Sanderson came up with the idea for Biker Down. Jim is a firefighter at Kent Fire and Rescue Service (KFRS) and he was out on a group ride when a rider came off on a fast dual carriageway. He had to go into professional mode to control the accident scene to protect the downed biker, and to organise emergency services to attend. He realised that he was the only one there that had much idea what to do. It’s also true that he realised that what he was doing wasn’t actually “that difficult” and that he could teach those crash management skills “to the average rider”.
So Jim set to and put together that accident scene management module. For the second module, covering emergency first aid, Jim enlisted the fire service’s in-house paramedics. Along with advice on emergency first aid, they also brought in the then-revolutionary idea that two people working together and using the correct technique could safely remove the helmet of an unconscious rider in order to clear the airway to assist with breathing, and also in the case that CPR was needed.
So far, so good.
But Jim also realised that to ‘sell’ the new safety intervention to the higher-ups at KFRS, a crash PREVENTION module would also be needed. And that’s where I got involved.
Jim and I had been knocking ideas back and forth across the internet for a couple of years by this point, discussing various safety issues such as the ‘Sorry Mate I Didn’t See You’ SMIDSY collision and group riding crashes. As he used to say later when introducing me at Biker Down events in Kent; “we didn’t always agree but when we didn’t and discussed it the bugger always seemed to be right”. Suffice to say, I changed Jim’s mind on several aspects of crashing!
So Jim messaged me about his planned course, and we had a back-and-forth discussion about what might work for this crash prevention module. I came up with several ideas.
With my suggestions in hand, Jim put the outline concept of Biker Down to his bosses and got permission to run three pilot courses on site at Ashford Fire Station, just so long as it was in his own time and run entirely by volunteers.
The first of the courses was delivered to members from the bike forum where we’d met. It was in the autumn, and as they were keen on group rides, I developed and delivered a talk on group riding techniques for them.
The very first Biker Down course
It included a demo of what often goes wrong on a group ride as the leader speeds up and everyone behind races to catch up. I used a piece of elastic, with cut-out cardboard bikes on it, stretched it out to represent the increase in speed, then let one end go – all the ‘bikes’ crashed into each other. I also got the attendees walking around the room to see how two different ‘marking systems’ worked – the ‘leapfrog’ (where a marker sits tight as everyone in the group goes past, until the backmarker arrives) and the ‘caterpillar’ system I learned on my training with the National Motorcycle Escort Group (where each rider waits only for the bike behind, whereupon they swap places).
Feedback was good enough to go ahead with the second pilot a few weeks later.
A still from the original ‘Think once, think twice, THINK BIKE’ public information film
This time, I delivered a very different presentation – it was all about the reasons for collisions involving motorcycles and drivers at junctions (intersections). The key point was that rather than say “drivers don’t look properly”, I explained that almost all drivers DO look, but all too frequently, they fail to see the motorcycle. There’s a difference. I explained issues such as motion camouflage and looming, peripheral blindness and saccadic masking.
I also discussed the lack of practical evidence for any positive effect from day-riding lights and hi-vis clothing – there’s been no obvious reduction in the proportion of collisions happening at junctions. I pointed to research from the 70s that found that a dipped headlight made for a poor daytime light because the beam is focused below eye level of anyone looking at it, so a more diffuse light source was needed. And I also made the suggestion that it was likely that in daytime conditions in a rural environment, the best-contrasting colour for hi-vis was likely to be pink!
Jim was happier with this presentation and decided to adopt it for the third pilot, which ran a few weeks after the second. I gave it a few more tweaks, and when Biker Down was properly launched in the spring of 2012, it was this talk which was included.
It quickly became known as the ‘Science Of Being Seen’, and usually concluded the three-hour course. Jim got some funding from the road safety account too, for publicity, expenses for volunteers, and also to provide free first aid kits to attendees.
Kevin trainer and SOBS – Jim firefighter and crash scene management – Andy first responder and first aid
Jim had always wanted Biker Down to be ‘open access’ enabling any FRS in the UK to roll out the course, and by March, he’d created a Biker Down UK Facebook page to put the word out about what we were doing in Kent. I don’t know how many Biker Down courses we delivered at Ashford that year, but at one point, we were running one every couple of weeks and as well as the interest from bikers, it wasn’t long before other Fire and Rescue Services (FRSs) were sending representatives to see what it was all about.
Later in 2012, Biker Down was nominated for a Prince Michael of Kent International Road Safety Award. At the end of the year, we all made the trip to the Savoy in London for the awards ceremony, and we were very pleased to be one of the winners in the motorcycle category.
At the Savoy for the Prince Michael of Kent award ceremony
There was just one slight hitch – my status and connection with the fire service.
In-house fire service rules prohibit any activities that might seem to be promoting a commercial business. Since I run Survival Skills with an eye to eating and paying my bills, it might reasonably have been argued that even though I was giving my time for free, my relationship with KFRS was in violation of those rules.
Almost certainly because of that, there was a suggestion to bring me ‘on board’ by becoming an official volunteer, but I quickly realised that there was a big issue for me to consider. By becoming a volunteer my SOBS presentation would likely end up becoming the property of KFRS. I’d actually be handing over the rights to the talk. Not only could I potentially lose control over the content, but all I would be getting in return for my hundreds of hours of personal research would be expenses for attending and delivering the talk.
I mulled it over, and decided I needed to retain rights over my ‘intellectual property’ by not signing up as an official volunteer and thus continuing to provide the talk and my time for free. All my time was given gratis, free and for nothing. The only income I ever received was from selling books to attendees.
In the event, nothing more was said so I guess an official ‘blind eye’ was turned my way. Looking back, the only hint that there might have been an issue was that Jim created his OWN version of Science Of Being Seen for the ‘open access’ pack that he produced to be handed out to other FRSs. He said it was ‘dumbed down’ to allow any firefighter to deliver it. Retrospectively, it may have been a move to get around the intellectual property issue.
Over the next few years, I continued delivering SOBS at Biker Down events in Kent on a monthly basis.
We also ran courses at MCN’s offices up in Peterborough, and I went with the Thames Valley team to Honda’s Bracknell headquarters to deliver SOBS there.
Yes, that is Danny John-Jules – he came along to the Honda Biker Down event
There were a couple of other events, details of which I can’t immediately recall. And in 2014, I was also invited to get involved in the KFRS ‘Ride Skills’ events at Brands Hatch too.
Back in 2012, the content of SOBS was far from universally accepted. Thanks to some searching questions – including a few hostile ones – I decided to create a more in-depth explanation of each element of the presentation with credits to the original research on which I had based each segment of SOBS.
The banner with the Science Of Being Seen website
The obvious place to put this in-depth background information was online. It can be found at www.scienceofbeingseen.org and I included the link at the end of all my presentations, thus enabling anyone to access it and research the original sources themselves if they felt the need. I’m still updating the site regularly with newly-discovered research, by the way. I also summarised the presentation in a slim paperback to enable attendees to take away a ‘aide memoire’.
And that brings us to 2020. We had time for just one Biker Down event, right at the beginning of March 2020 before we went into lockdown.
Kevin at the Rochester Road Safety Experience, March 2020
That was to be the last course I delivered for KFRS.
Now I need to backtrack to September 2018.
Jim announced that a Canadian company called Medical Data Carriers (MDC) was about to supply Biker Down with free sticky contact data cards to replace the ‘green dot’ cards that had been previously handed out with the first aid kit but were costing too much.
This is where the Steve Reed mentioned above comes into the story. It transpired that Steve was keen to set up Biker Down North America and in January 2021, Jim announced:
“Over the last 2 years I have been working closely with Steve Reed from MDC and we are now proud to hear that the National Fire Chiefs Council (NFCC) has approved Biker Down North America.”
At this point, internal discussions about how to relaunch Biker Down were underway, and I believe it was at Jim’s suggestion that I made contact with Steve in February and asked if he was familiar with SOBS. I sent him some background to explain why SOBS was part of Biker Down, and mentioned that SOBS had also been used by the New Zealand Transport Agency and their Accident Compensation Corporation on the Shiny Side Up rider safety interventions in 2018 and 2019. On February 20, Steve responded:
“I have been thinking about how best to deliver that 3rd module” and said ” I do see the value in your SOBS content and it would be very unique here in America.” He asked if the material and content could be “tuned easily for North America”.
I replied that I didn’t see any issue with that, as the same crash mechanisms apply, just in mirror image. We swapped a few more questions and answers, and Steve requested a video of me delivering the presentation and speaker notes. I duly provided those on March 10. On May 6, Steve asked for an ‘about you’ resume and photo, which I also sent over.
It was around six weeks later, on June 25, that I discovered my SOBS module was being replaced by a new ‘Thinking Biker’ video. This would be shown to promote a new discussion session as the final module of Biker Down, and it would be adopted right across the UK. I hadn’t heard a word about this previously, and at much the same time, I got a letter from the KFRS assistant manager for buildings and works to tell me that I was no longer allowed on fire service property. It appeared both SOBS and myself had been well and truly dumped without ceremony.
I’ll admit I’m speculating but I believe this is what probably happened. Whilst things were at a stand during lockdown, seeing that well over half of the county’s FRSs were running Biker Down courses at a local level, the National Fire Chiefs Council – the top body of the fire service – decided to adopt Biker Down as a national fire service initiative. At any event, Biker Down is now a module in the re-launched Enhanced Rider Course being offered by the DVSA. But whatever the facts, I won’t go into that any further.
It didn’t take long to discover that ‘Thinking Biker’ was being made in Canada, by Steve Reed. I sent Steve a message asking if he could: “update me on ‘The Thinking Biker’ and where – IF – SOBS fits in with this?”
Back came his reply.
“My IP lawyer found that we could not publicly use SOBS title for the module because someone had a trademark that had similarities in training here in North America. With that news and considering that there are several safety messages that we want to include in the module and that we may want to add more later, a more all encompassing name was selected that we could use. We are also making his [Jim’s] module in video to reduce staff costs. I am writing script now and it is going to be in the spirit of a Fort nine video. 8-10 minutes. So no we won’t be using your presentation for this.”
I ran Google searches on the ‘science of being seen’ term and drew a blank. As far as I can see, the only references are to SOBS as part of Biker Down, to my own website work, and as a presentation being delivered by myself. I’m guessing the issue was that the term ‘science of being seen’ was associated with myself and my Survival Skills training school.
Copyright – it’s on my SOBS work
Later that year, I attended a Biker Down course for myself in West London, hoping to see the Thinking Biker video. The presenter actually delivered a badly-mangled version of SOBS. When I mentioned I was the original author of SOBS and asked why we hadn’t been shown Thinking Biker, he told me it wasn’t quite ready for use.
Some months later, a contact at another FRS did send me a copy of Thinking Biker, so naturally I watched it. What was rather a surprise was to hear the presenter say at just 30 seconds into the video:
“Today, we’re taking a deep dive into the art and SCIENCE OF BEING SEEN on motorcycles.”
My capitals, by the way. So they couldn’t CALL the video ‘Science Of Being Seen’, but they could TALK about the science of being seen. Hmm.
================================= WHAT IS SCIENCE OF BEING SEEN? (SOBS)
SOBS is my in-depth investigation into the ‘Sorry Mate, I Didn’t See You (SMIDSY) collision between motorcycles and other vehicles.
Created for the fire services ‘Biker Down’ course, it’s based on science, not speculation.
I aim to quash some persistent myths about how and why junction collisions happen, and show how motorcyclists can employ simple techniques to stay out of trouble!
So what does Thinking Biker cover? What are all the new safety messages that are included that weren’t in SOBS?
The first explanation is of foveal vision, an optical phenomenon I mention in SOBS.
Then comes the issue of saccadic masking during eye movements which shuts down the visual feed to prevent motion blur, plus the fixations which are the brief moments we actually gain visual data. That’s in SOBS. Moreover, Thinking Biker using the very same ‘vertical blinds’ metaphor I use in SOBS which I admit to having pinched myself from a very good video by the Association of British Drivers – they get a credit on the website and in the book. The only difference with the Thinking Biker explanation is that it uses a short video segment rather than a still picture. Oh, and the steering wheel’s on the other side of the car and traffic on the ‘wrong’ side of the road.
Next, we get a short clip of a driver looking but failing to see a motorcycle from one of the UK’s ‘Think Bike’ videos – I’ve used stills from the exact same video.
Following that is a very clever video of a horse galloping across a prairie amongst stationary grazing cows to flag up the effect of lateral motion on detection. This is a concept I was introduced to by Malcolm Palmer, another UK instructor at the time. Years back, Malc talked about a double ‘back and forth’ movement across the lane he called the ‘Z Line’ and proposed it would attract attention. I always credited Malc for that element of SOBS. But if an object is rapidly approaching against a static point background…” – as you probably guessed, it’s the concept of motion camouflage. I use a video clip of a Spitfire flying straight at the camera and being almost impossible to spot until it’s almost on top of the camera.
We’re then told that a driver devotes about 0.5 second to scanning an intersection; a figure that just happens to be in the SOBS presentation.
And then there’s a mention of visual obstructions caused by the windscreen pillars and blocked lines-of-sight because the motorcycle is behind another vehicle. Guess what? SOBS covers that too, using the ‘beam blindness’ term I picked up in a FortNine video.
What follows next is a rather confused segment where the presenter appears to recommend hi-vis in what they call ‘Neon green’ – we call it ‘Saturn yellow’. The argument is that this works because “humans are most sensitive to light at a wavelength of 555 nanometers”. That IS fresh info but having talked about the value of ‘Neon green’ as a hi-vis colour, the video actually shows a rider wearing a mixed yellow / orange sleeveless vest! It’s also very hard to see she is actually wearing hi-vis from the three-quarter ahead angle the video clip is filmed from – that’s the very reason I recommend hi-vis with sleeves, something that doesn’t get a mention.
Next item. “While Neon green may stand out against dull concrete jungles, it might blend in nicely in lush green environments.” Ah, right back to the SOBS script.
I’ve been using this wonderful photo to illustrate the relationship between foreground and background colours, and conspicuity.
However, for some reason, the production team decided that using a photo of cannabis leaves was the right image for their ‘lush green environment’. Oh dear.
“As thinking bikers, we need to have multiple strategies at hand”. Our presenter is now shown holding an orange hi-vis in one hand, and a pink one in the other.
Pink with sleeves – as recommended by SOBS
As far as I am aware, SOBS on Biker Down was first safety intervention to suggest that pink hi-vis is probably the most conspicuous in a rural environment – it’s less the sensitivity of the eye that matters, much more the contrast between the hi-vis and the background colours. As the humble colourwheel used for picking paint combos for home decorating shows, the colour that contrasts most strongly with yellow / green foliage is pink.
There’s one more element still to come – camouflage. And the example just happens to be the very same one that I use for SOBS – the tiger. Even though the tiger is hi-vis orange, the stripes disrupt the silhouette of the animal and help it to blend in with the environment. “If you use the right colour then use patterns to confuse the eye, you’re practically invisible”. Exactly as SOBS explains.
The tiger graphic from my SOBS presentations
Dazzle camouflage – also using an illustration that I’ve used myself – is also mentioned, but in a confusing segment that suggests that it means that “big blocks of contrasting colour make you stand out” rather than break up your outline. Unfortunately, once again, the presenter is wearing a sleeveless, two-colour vest. That’s very much the opposite of what SOBS suggests. Sticking to a single colour, even when it’s black, presents a coherent silhouette in a way that stripy, multi-colour vests don’t.
Struggling to see any new safety messages, I am reasonably certain that an impartial observer would also see that Thinking Biker covers much of the same ground as SOBS.
Since Thinking Biker largely parallels SOBS, I would say that it offers reasonably accurate information but there are some buts.
For starters, it’s not so logically ordered. I put a lot of thought into how to construct the talk so that ideas flow.
Second, Thinking Biker gets delivered in seven minutes. In such a short time there’s nothing like the depth of explanation I achieve with my presentations.
Third, there is that clear misunderstanding of the role of dazzle camouflage.
Fourth, there is the issue of discussing ‘Neon green’ whilst showing a very different dual-colour vest in the clip. SOBS talks about the role of a single colour – ANY colour – in creating the recognisable silhouette of bike and rider.
Fifth – and here my advice in SOBS diverges completely from Thinking Biker – there’s no mention of full sleeved hi-vis, only vests. It’s ironic that the video clip used to show the hi-vis vest in action amply illustrates my point – the dual-colour tabard is almost invisible from the chosen camera angle because most of it is obscured by the bike’s screen and the rider’s black leather sleeves. SOBS actively promotes the choice of a full-sleeved hi-vis jacket and emphasises the role of the rider’s arms in enhancing conspicuity.
Sixth – what’s missing? There’s nothing the issue of ‘saw, looked and misjudged speed and distance’. There’s nothing about day-riding lights or night-time conspicuity.
And seventh and pretty crucially in my opinion, there’s no mention of the need for a genuinely proactive approach to riding defensively. The biggest weakness of conspicuity aids is that they are entirely ‘passive protection’ and rely 100% on the driver of the other vehicle taking notice of the rider’s hi-vis and DRLs.
I use the final element of SOBS to emphasise the importance of taking proactive steps; changing position to ‘see and be seen’, applying the Australian technique of ‘setting up the brakes’ to reduce reaction times, the use of the horn as a warning when we think a driver might be about to move into our path, the surprising effect of reduce speed to cut stopping distances (halve speed, and stopping distance drops to one quarter), and the need to practice swerves and hard stops to keep them fresh.
Taking SOBS online to New Zealand audiences for Shiny Side up in Feb 2021
And then we roll to the end, and to the credits. We see: “Producer and writer – Steve Reed” then “Producer and writer – Jim Sanderson”.
Not a mention of my delivery of SOBS for the third module of Biker Down, no mention of me sending an annotated copy of the SOBS presentation plus background information to Steve, and no hint that the SOBS presentation might have been any kind of inspiration for the content of Thinking Biker.
Let’s return to the interview with Steve Reed at the Toronto Motorcycle show earlier this month. Steve says:
“Fast forward 10 years later, the UK has seen their motorcycle fatalities reduce by 30%. We like to attribute a lot of that to Biker Down and some other great programs there.”
A 30% reduction in motorcycle fatalities since Biker Down started? That’s a claim that I cannot see supported with any crash statistics I am aware of over the period from 2012 to 2022. Exclude the COVID year of 2020 when motorcycle and car use was down significantly on a normal year and crashes were down, the best you can say is that the figure has flat-lined.
And then he moves on to talk about the three modules. About the third module, Steve says that it is:
“…little bit of a proactive segment so in that we’re teaching a little bit of the science of why we’re not seen on the road as motorcyclists.”
Science of Why We’re Not Seen? Hmm.
He continues:
“So we’re talking about saccadic masking and looming and some other sciency stuff that really will make sense to us as motorcycle riders but also as car drivers to be better and more aware of our surroundings and especially motorcycle riders and some of the other things we touch upon in there is also conspicuity strategy so what should I be wearing in the urban environment what should I maybe be wearing when I’m outside of the urban environment and really helping people be prepared in that respect.”
I’ve seen comments to the effect that I don’t ‘own’ the science. That’s true, and I have never claimed to. One of the reasons for producing the SOBS website was to ensure that the authors of the original research WERE credited, something I never have time to do during the live presentation.
Nor did I perform the original research. I certainly didn’t discover motion camouflage or the phenomenon of looming, I don’t claim any discovery of saccadic masking, nor was I the first to suggest dazzle camouflage – though I did manage to describe it correctly.
What I believe was unique about SOBS back in 2012 was that for the very first time all the disparate elements behind the ‘Sorry Mate I Didn’t See You’ SMIDSY crash were brought together:
SOBS brought in the three mechanisms that cause collisions at junctions; looked and COULD NOT see, looked but FAILED to see, looked, saw but MISJUDGED speed and distance.
SOBS looked at how the structure of the vehicle and roadside obstacles obscured views for drivers and made motorcycles difficult to see.
SOBS introduced riders to the science of visual perception in order to explain just how and why drivers can look but fail to see motorcycles at intersections or misjudge their speed and distance.
SOBS looked at the science behind conspicuity aids to explain their strengths and weaknesses, and why riders should not assume that their use will ensure they are seen.
SOBS made a big point of emphasising the crucial role to be played by a genuinely proactive approach to identifying the threat, assessing the risk and proactively managing those risks.
By pulling these threads together, SOBS was able to tell a coherent story about the SMIDSY to motorcyclists for the first time.
The business card with the essentials of SOBS given to Biker Down attendees by me
It IS possible that Steve Reed employed people to perform a literature survey of the research into the SMIDSY collision, which duly came up with more or less the exact-same conclusions I had previous reached. After all, the background science is unchanged.
So I leave you to draw your own conclusions about Thinking Biker and where the source material most likely came from.
I mentioned intellectual copyright. Had the idea for the Science Of Being Seen come from inside KFRS, and had I developed SOBS under their instruction, then I think it almost certain that my contributions to Biker Down would been legitimately regarded as the property of KFRS. In that case, KFRS could have passed that information on to Steve Reed.
But the facts are these; I was asked to develop a suitable module for Biker Down and went on to create SOBS from scratch. As I’ve also pointed out, SOBS was the second presentation created. I’d argue this means I was in the role of an outside ‘consultant’ being brought in to develop and deliver a suitable course, and since the choice of content was left to me, I would argue the concept and content of SOBS remains my intellectual property.
Having said that, the intent was always to share the fruits of my research freely to ALL motorcyclists to help improve understanding of the SMIDSY crash, just as I have done for years via my posts on forums and on Facebook. For that reason, the SOBS website and all the content in it is provided under a Creative Commons Licence. The sole requirement is that anyone using my research in their own work attributes it to me.
I neither asked for, nor took, a penny from KFRS or any of the FRSs for developing the presentation or for my time spent delivering it. Nor did I ask for payment from Biker Down North America when recording and annotating the video for them. I placed one and only one condition on using the content of SOBS, whether by the UK FRSs or by Biker Down North America – if my information was used, I asked to be credited with the original idea for the presentation.
That’s all I requested, and I know that many of the UK FRSs delivering SOBS as part of Biker Down have scrupulously referenced my contribution at the end of their own presentations. The credit requested is conspicuous by its absence.
This isn’t ‘sour grapes’. I will always be thankful to Jim for that initial invite to become involved, even if the parting of the ways in 2021 could have been handled with more sensitivity. I’m very proud of what Biker Down has achieved, both in terms of the awards and developing from a local rider safety initiative to something that’s been recognised as of national significance. And I’m still happy to support Biker Down whenever I can – I will still talk up the course and I have stickers in the car and on the bike.
But I am left with a degree of frustration about what has happened subsequently, after after I sent Steve Reed the SOBS video, transcript and speaker notes in good faith, and how my input appears to being written out of the official story.
The most recent SOBS graphic
Anyway, done is done, and I will leave it at that, having explained my perspective. Thanks for reading, and I hope you know have a better understanding of the relationship between myself, KFRS and Biker Down, and the new ‘Thinking Biker’ video.
================================ PLEASE SUPPORT ‘SCIENCE OF BEING SEEN’
The ‘Science Of Being Seen’ project (SOBS) is FUNDED ENTIRELY BY MYSELF and I need YOUR SUPPORT to continue my research.
The SOBS project is FREELY AVAILABLE to all motorcyclists and aims to help improve our understanding of the ‘Sorry Mate, I Didn’t See You’ SMIDSY collision.
== RESCHEDULED… RESCHEDULED== LIVE TALK EVENT 8PM TUE 16 JAN
IF YOU WANT TO UNDERSTAND MOTORCYCLE CONSPICUITY
THEN YOU NEED TO UNDERSTAND CAMOUFLAGE FIRST!
live talk event RESCHEDULED 8pm TUESDAY 16 January
“We’re sold a shed-load of clothing that’s supposed to enhance our conspicuity. But does it? What would work best? The easiest way to find out is to start by looking at what does the opposite – what kind of colours and patterns act as camouflage!”
Broadband has now been restored after yesterday’s connection problems so the LIVE TALK EVENT will go ahead tonight (Tue 16 Jan) at 8pm. Sorry for any inconvenience, it was out of my hands. If you can’t make it live, watch on catch up.
There’s not much I can do to influence what FB shares but I’m sure you ALL know by now that just how the platform chooses to share posts and videos is pretty unfathomable. Right now, I’ve noticed that hits on my pages are down despite an all-time high of followers / subscribers.
2) LIKE, COMMENT & SHARE posts – it’s an effective way of increasing exposure and takes just a second or two of your time
3) FOLLOW ME ON FB… but also FOLLOW ME ELSEWHERE
This is why I encourage people to sign up to my Ko-Fi page (it’s free and you get email alerts every time a new post goes up) or to subscribe to my Substack newsletter which goes out with a weekly digest of the previous 7 days posts delivered to your inbox.
That way you WON’T MISS A POST and you can pick and choose what to ride WHEN YOU WANT TO READ THEM.


















 The very first Biker Down course
The very first Biker Down course A still from the original ‘Think once, think twice, THINK BIKE’ public information film
A still from the original ‘Think once, think twice, THINK BIKE’ public information film Kevin trainer and SOBS – Jim firefighter and crash scene management – Andy first responder and first aid
Kevin trainer and SOBS – Jim firefighter and crash scene management – Andy first responder and first aid  At the Savoy for the Prince Michael of Kent award ceremony
At the Savoy for the Prince Michael of Kent award ceremony
 Yes, that is Danny John-Jules – he came along to the Honda Biker Down event
Yes, that is Danny John-Jules – he came along to the Honda Biker Down event The banner with the Science Of Being Seen website
The banner with the Science Of Being Seen website Kevin at the Rochester Road Safety Experience, March 2020
Kevin at the Rochester Road Safety Experience, March 2020

 I’ve been using this wonderful photo to illustrate the relationship between foreground and background colours, and conspicuity.
I’ve been using this wonderful photo to illustrate the relationship between foreground and background colours, and conspicuity.  Pink with sleeves – as recommended by SOBS
Pink with sleeves – as recommended by SOBS The tiger graphic from my SOBS presentations
The tiger graphic from my SOBS presentations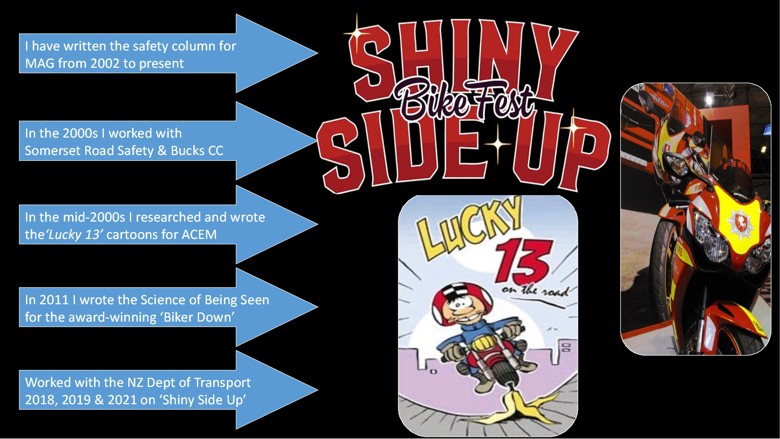 Taking SOBS online to New Zealand audiences for Shiny Side up in Feb 2021
Taking SOBS online to New Zealand audiences for Shiny Side up in Feb 2021
 The business card with the essentials of SOBS given to Biker Down attendees by me
The business card with the essentials of SOBS given to Biker Down attendees by me
 The most recent SOBS graphic
The most recent SOBS graphic