SUMMARY – sometimes the driver sees the motorcycle but miscalculates ‘time to collision’… the size-arrival effect means smaller, nearer objects are incorrectly judged to arrive LATER than larger, more distant objects… compared with cars and vans, the ‘time to arrival’ of motorcycles is estimated to be significantly later… the rider may make it difficult for the driver to judge speed and distance by travelling faster than surrounding traffic… riders exceeding speed limits are more likely to be killed in a collision…
You’ll remember that the SMIDSY collision involves a cascade of potential issues:
- does the driver look at the motorcyclist?
- does the driver realise that it is a motorcyclist?
- does the driver correctly decide whether the motorcyclist poses a hazard?
We’ve worked through the likely causes of the first two parts of the problem so now it’s time to look at the third. It’s possible for the driver to look in the right place at the right time, see the approaching motorcycle, yet still misjudge its distance and speed. The driver may then make an inappropriate and unsafe manoeuvre when the motorcyclist fully expects to be seen and for the driver to give way.

What goes wrong?
The simplest explanation is that motorcycles don’t perform like cars, and motorcyclists don’t ride motorcycles like drivers drive cars. As we’ll see, we do tend to ride faster than the vehicles around us and we don’t always don’t consider that the majority of drivers are not familiar with a motorcycle’s performance and agility characteristics, nor will they be fully aware of the decision-making processes of a motorcyclist. The authors of the report ‘Improving Safety for Motorcycle, Scooter and Moped Riders’ state:
“PTW riders’ behaviour can also indirectly contribute to the fact that they are not easily perceivable. PTWs can surprise other road users by deviating from behavioural standards with their manoeuvres, for example by their positioning (eg riding in the blind spots of cars), speeds and acceleration capacity and confound the perceptual strategies of car drivers.”
In other words, what we do on a motorcycle can catch out a driver. If the motorcycle accelerates more rapidly or moves faster than the driver expects from monitoring other traffic, it’s likely to add to the problems of calculating an accurate time-to-collision. It shouldn’t be surprising to a motorcyclist but it IS something that we need to consider.
But sometimes the motorcyclist is travelling in a stream of traffic and not doing anything unusual and the ROWV still results? Why?
To begin to understand, we need to answer a question. How does a road user – rider or driver – determine whether there is a safe gap in which to turn, one that enables the manoeuvre to be completed without putting anyone at risk?
The necessary distance depends on how fast the vehicle is approaching, how far away it is, and how much time the turning vehicle needs to clear its path. If we think we have enough time, we’ll turn. If we don’t think we have sufficient time, we’ll stay put – this is termed ‘gap acceptance’.
To be able to accept a safe gap and reject an unsafe gap, we rely on our perception of depth. Depth allows us to locate our own position relative to that of the target object. The rate of change of our relative positions thus allows us to estimate speed and distance. And once we know that, we can calculate a ‘time to collision’ figure which gives us a window of opportunity to avoid contact.
So the crux of the issue when we decide whether or not to accept a gap is our estimation of ‘time to collision’.
One of the first trials of gap acceptance that I can find was carried out by Fulton et al (1980) for the Transport and Road Research Laboratory (TRRL). The gap acceptance behaviour of motorists towards a motorcycle in three conditions (control, dipped headlight and fluorescent jacket) was measured. Here’s how they carried it out:
“An experimental motorcycle was introduced into the traffic flow and a study made of responses to controlled gaps which were presented. It was apparent that to achieve an adequate data collection rate the motorcycle would have to make very frequent passes across the junction under study. A rapid circuit was achieved by conducting the trials at a large roundabout. The roundabout had a circumference of approximately 530 metres (1/3 mile).“Two video recorders were secured on a 3.6 metre (12 feet) high platform in the centre of the roundabout. The recorders were each positioned to film one of two junctions selected for observation.“The 250 cc motorcycle followed a lead car, which was necessary to stop vehicles at the junctions and to enable the following motorcyclist to control the presented gap. The speed of the car and motorcycle was approximately 25 mile/h. Gaps between 1.5 and 5.0 seconds were used in the trials. The options were changed at half-hourly intervals with the order of presentation being varied between days. A total 1,854 passes were recorded… From the 1,854 passes (927 circuits) taped a total of 352 acceptances and 922 rejections were recorded.”
The motorcycle passed four roads (the two being surveyed by the camera plus two others) making a total of 3708 passes for the 927 circuits. The results might surprise you:
“…during this time there were no conflicts between the motorcycle and other vehicles.”
In other words, not a single vehicle pulled out into the motorcycle’s path. Moreover, when the data was analysed, comparing the control (no lights or hi-vis) with the motorcycle using either dipped headlight or fluorescent clothing, the results:
“…showed that the use of fluorescent clothing or a dipped headlight on the experimental motorcycle had no significant effect on the sizes of gaps accepted.”
However, thanks to the total absence of right-of-way violations, it wasn’t actually possible to test the theory that conspicuity aids reduced the risk of drivers choosing to make an unsafe manoeuvre. The authors concluded:
“The true effectiveness of these aids will only be realised when all motorcyclists use them and their effect can be observed in the national accident statistics.”

Although this might help us accept the fact that ROWVs aren’t as common as motorcyclists typically believe, it is true that motorcycles are particularly vulnerable to gap acceptance errors and the study results don’t explain what happens when drivers see bikes then get their mental sums wrong.

Quite obviously, when we are estimating speed, distance and time to collision, we’re not doing this with a sophisticated range finder and a calculator. We have to make use of the brain’s perceptual abilities. By now you should be getting a hint of the problem. As we have already seen in other ways, the brain isn’t infallible.
How does the brain make this ‘time to collision’ judgement? It was originally thought that we used motion-based cues. In other words, we would assess movement by measuring the rate at which the apparent size of an object changes with time.
In fact, this theory seems to be inadequate. We actually appear to hold a mental picture of the object where the size of the object gives us a clue to the object’s distance. For example, we know roughly how big a locomotive is, so by observing the apparent size of the locomotive, we gain a sense of its distance. We only need a quick glimpse of the locomotive to assess this. As we typically look left-and-right at a junction for less than 0.5 of a second, it would seem that it is this ‘snapshot’ glimpse of other vehicles that we rely on to make the time-to-arrival judgement.
Above is a still snapped from the original 1970s ‘Think Once, Think Twice, THINK BIKE’ public information film. The presenter is making the point that a motorcycle is a third of the width of a car.
And that gives us an indication of the problem. Not only are bikes harder to see but experiments looking at perception of objects have shown that smaller, nearer objects are incorrectly judged to arrive LATER than larger, more distant objects. This has become known as the size-arrival effect. It’s been studied in a number of papers; for example DeLucia (1991). Horswill et al (2005) investigated whether the size-arrival effect might potentially contribute to the high accident risk of motorcyclists:
“Drivers adopt smaller safety margins when pulling out in front of motorcycles compared with cars. This could partly account for why the most common motorcycle/car accident involves a car violating a motorcyclist’s right of way. One possible explanation is the size-arrival effect in which smaller objects are perceived to arrive later than larger objects. That is, drivers may estimate the time to arrival of motorcycles to be later than cars because motorcycles are smaller.“Even when a driver has detected an oncoming vehicle, he or she must then judge whether there is sufficient time to pull out safely in front of it. To do this requires drivers to estimate the oncoming vehicle’s time-to-arrival. If the strategies used by the driver to judge the time-to-arrival of oncoming vehicles yield a different estimate for motorcycles compared with cars, then this may also help explain the smaller time gap.”
Horswill et al performed a fairly simple experiment where subjects were shown video footage of oncoming vehicles and had to press a response button when they judged that vehicles would reach them. The results indicated that when compared with larger vehicles (a car and a van), the ‘time to arrival’ of motorcycles “was estimated to be significantly later than for different approach speeds and viewing times”.
The results confirmed previous experiments carried out by Caird and Hancock in 1994 which also found that time-to-arrival estimates were later for smaller vehicles (motorcycles or small cars) than larger vehicles (large cars or vans) consistent with the size-arrival illusion. Caird and Hancock had used computer-generated stimuli in which different vehicles approached participants at a road junction, but the experiments were criticised for a lack of realism, specifically a lack of detail such as textures, curbstones, or familiar geometric features which are necessary to work out scaling.
Horswill et al (2005) concluded:
“These findings suggest that perhaps drivers should be made aware that they are subject to an illusion when judging whether to pull into the path of an oncoming vehicle and that this illusion may lead them to choose smaller gaps in front of smaller vehicles such as motorcycles.”
To sum up, here’s the sequence of events:
- looking at an approaching motorcycle, drivers perceive the motorcycle to be further off than it really is…
- thus miscalculating time-to-collision…
- mistakenly selecting an inadequate gap…
- leaving insufficient time to clear the motorcycle’s path…
- creating the ROWV and setting up the circumstances in which the subsequent collision can occur
If we are looking for plausible explanations of why drivers pull out into tighter gaps in front of motorcycles, this ‘looked but misjudged’ explanation seems much more reasonable than the commonly-held belief that drivers don’t see motorcycles as a threat and so deliberately pull out in front of them.
There is one other factor to consider. Non-motorcyclists often accuse motorcyclists of riding too fast. Is this true?

Most motorcycles are capable of accelerating faster than most cars and vans from a standing start. My personal observation is that most of us riders use this ability at traffic lights and other intersections to get clear of other traffic thus making subsequent manoeuvres – such as lane changes – easier. In a typical urban environment with many intersections, it’s likely that from a side-by-side position, the motorcycle will be first to arrive at the next junction, often well before cars and vans. If this is the case – and I’ve yet to see a study on the issue – it would not be surprising if PTWs were over-represented in collisions at intersections – the bike would be the first vehicle to arrive.
But having reached a ‘cruising speed’, do motorcyclists then exceed the speed limit whilst travelling between junctions? A study in Wellington, New Zealand found that motorcycles were moving around 10% faster than the other traffic, but they were not necessarily exceeding the speed limit. 10% sounds a lot, but where the average speed of cars was 35 kph, the motorcycles were travelling on average just 3.3 kph faster than cars. But Walton and Buchanan also found that although most motorcycles were travelling within the speed limit, a motorcycle was 3.4 times more likely to be exceeding the speed limit than a car. A similar study from Melbourne, Australia, found that motorcycles were 3.3 times more likely to be exceeding the speed limit than cars.
But perhaps motorcyclists are the victims of other speeding road users. Smith et al (2013) looked at police data from London, and found:
“There were three collisions where another vehicle in the collision was recorded as ‘exceeding speed limit’. This is a much smaller group than the motorcycles that were exceeding the speed limit [45 out of a total of 93 fatalities], suggesting that speed-related collisions are mainly due to the speed of the motorcycle rather than the other vehicle.”
In other words, in the majority of collisions where one road user was speeding and the outcome was a fatal accident, it was much more likely to be the rider speeding and not the other driver. So just how fast were the motorcyclists who were involved in fatal accidents travelling?
Figure 6-3 [the bar graph below] shows the estimated speeds of each motorcycle, where known, compared with the speed limit of the road. Each bar represents one motorcycle and shows the range of the estimate, with each speed limit shown as a different colour. The very small bars are those where only a single figure of speed was given, rather than a range. These generally would be a minimum speed. This shows that on 30mph, a large number of motorcyclists were exceeding the speed limit, some by a large margin. On 40mph roads there was also a large proportion of ‘speeders’, with one motorcycle estimated to be travelling between 111mph and 127mph.
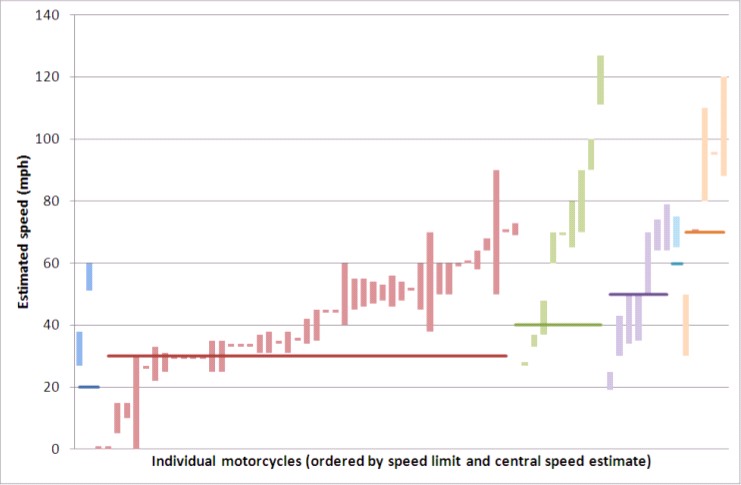
The bars represent the estimated travelling speed and impact speed of the motorcycle, based on measurements at the scene, expert opinion or on witness evidence.
The graph indicates that on roads with a 20 mph limit (~30 kph), both riders killed were exceeding the limit, with one riding at between 50 and 60 mph.
In 30 mph limits (~50 kph), although some riders were at or below the limit, most of the motorcyclists were exceeding the speed limit, some by a large margin.
The same general pattern is repeated on 40 mph (~60 kph) roads where there was also a large proportion of ‘speeders’ involved in fatal crashes, with one motorcycle estimated to be travelling between 111mph and 127mph.
So it does appear that in these speed limits, which are typical of urban environments, where riders speed AND crash, they are more likely to be killed than riders crashing at or below the speed limit. It’s not surprising because the physical impact of a collision increases – mass x velocity.
But on the roads with 50 mph (~80 kph) and 60 limits (~95 kph) the riders involved in fatal collisions are less likely to be speeding, which once again reflects the bigger impact from a crash at the higher speed.
I cannot provide figures for rural environments (I’m looking) but the inference from these figures is that it’s not just the riders travelling at the highest speeds who are most at risk. We need to be aware that ANY junction poses at threat at open road speeds.
From the evidence above, I doubt it’s coincidence that speeding riders are over-represented in urban junction collisions. The more we behave in a way that is markedly different from other vehicles, the harder it is for a non-riding driver to factor us into their driving plan correctly.
So if you want to significantly reduce your chances of a fatal collision at a junction:
- don’t speed in urban areas but keep close to the speed of the traffic flow around you
- reduce speed near junctions in rural areas
Remember, it’s the speed at impact that counts.
——————————–
NOW AVAILABLE – LIVE SOBS PRESENTATIONS
CHECK OUT SURVIVAL SKILLS ONLINE TALK SERIES – NEW!
https://survivalskills.tidyhq.com/schedule/events
——————————–
Since you’re here, I’ve a small favour to ask. If you feel able to make a small donation to the upkeep and continued development of SOBS, why not buy me a coffee? Each contribution is much appreciated. Each cuppa keeps me awake and writing! Thank you.


Continue your journey to the next page…
References:
Caird, J. K., Hancock, P. A. “The perception of arrival time for different oncoming vehicles at an intersection.” Ecological Psychol 1994;6:83-109.
Davis, J., (2013) “Psychologist: Vehicle/motorcycle accidents possibly linked to brain miscalculations” Texas Tech Today September 10, 2013, Texas Tech University, retrieved from http://today.ttu.edu/posts/2013/09/psychologist-vehiclemotorcycle-accidents-possibly-linked-to-brain-miscalculations
DeLucia, P. R. (1991) “Pictorial and motion-based information for depth perception.” J Exp Psychol Hum Percept Perform 1991;17:738-48.
Fulton, E., J. Kirkby, C. and Stroud P. G. (1980) “Daytime motorcycle conspicuity” Supplementary Report 625 Transport and Road Research Laboratory. Institute for Consumer Ergonomics Loughborough University of Technology
Horswill, M. S., Helman, S., Ardiles, P., Wann, J. P. “Motorcycle accident risk could be inflated by a time to arrival illusion.” Optometry and Vision Science: August 2005 – Volume 82 – Issue 8 – p 740-746
Smith, L., Knowles, J. and Cuerden. R. (2013) “Analysis of Police collision files for motorcyclist fatalities in London, 2006-09.” Transport Research Laboratory Published Project Report PPR621
Walton, D., and Buchanan, J (2011) “Motorcycle Speeds at Urban Intersections.” Australasian Policing Road Safety Research, Policing and Education Conference,
“Improving Safety for Motorcycle, Scooter and Moped Riders – Factors contributing to powered two-wheeler crashes and their severity” DOI:http://dx.doi.org/10.1787/9789282107942-5-en OECD Publishing
Last updated:
Wednesday 1 May 2019 – revised for clarity, added crash data from TRL report PPR621
Tuesday 16 October 2018 – revised for clarity, fixed typos
IMPORTANT:
The material is free to all to access and use under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. That means you can share it with your family and friends, and re-use it for club magazines and websites, so long as you acknowledge the source and author and include the same Creative Commons license in the derived works.
Please note, this Creative Commons license excludes commercial use. If you wish to use any of my work for commercial purposes, including (but not limited to) articles in pay-for magazines or commercial websites, please contact me.

Kevin Williams has asserted his right under the Copyright, Designs and Patents Act, 1988, to be identified as the author of this work.
Photo credit Paul Townsend https://www.flickr.com/photos/brizzlebornandbred/20001313491
